
Lo scorso settembre ho raccontato come i robot di Boston Dynamics avessero aggiunto ai vari avanzamenti anche la capacità di eseguire routine di ginnastica e di stare in equilibrio su terreni difficili.
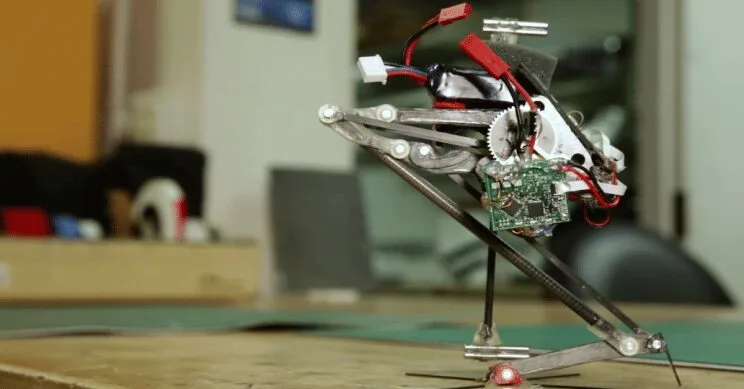
Ora un nuovo avanzamento nella robotica: Salto, il robot del laboratorio di biomimetica di UC Berkeley ha dimostrato di saper saltare con la precisione di un atleta olimpionico.
Alla Prince of Persia
È dal 2016 che Salto si esercita nel laboratorio di UC Berkeley Biomimetics per perfezionare la sua tecnica. Ne ha fatti di salti, e ne ha fatta di strada. Nel 2018, a due anni dal suo primo salto, si staccava già di un metro da terra. Un bel salto da fermo, dritto per dritto, come il vecchio platform di Prince of Persia.
C’era solo un piccolo problema: Salto non sapeva atterrare. Non è un problema piccolo, significa che i suoi salti impressionanti terminavano sempre con il robot disteso sul pavimento come un pattinatore artistico che non era riuscito a atterrare.
Il problema lo spiega il capo dei ricercatori che lavorano su Salto, Justin Yim. È che quando i ponticelli atterrano ad angolo, “il loro movimento di caduta può essere trasferito in un’enorme quantità di momento angolare”.
Ora atterra come una ginnasta
Una ginnasta risolve il problema del momento angolare facendo un passo per mantenere l’equilibrio. Questo non è possibile per Salto, per un semplice motivo: Salto ha una gamba sola.
E allora Salto ruota le braccia
Per questo motivo, “l’angolo di atterraggio di Salto deve essere molto preciso, o il momento angolare sarà troppo per impedire la coda della ruota di reazione”, ha spiegato Yim. “Cadendo da 1 metro, Salto ha solo 2.3 gradi di spazio di manovra avanti o indietro se vuole atterrare senza cadere”.
Il team UC Berkeley ha programmato il proprio robot Salto per girare la coda della ruota di reazione nello stesso modo in cui qualcuno atterrando su una trave o una sporgenza ruota le braccia per mantenere l’equilibrio quando non può fare un passo avanti.
In una prova di 60 salti, Salto è caduto solo tre volte, si è seduto sul suo “tallone” cinque volte e ha fatto un atterraggio perfettamente controllato 52 volte.
Una precisione che potrebbe aiutare il team di Berkeley a raggiungere il vero obiettivo: costruire un robot in grado di attraversare terreni difficili e aiutare gli umani nelle missioni di ricerca e salvataggio.

