
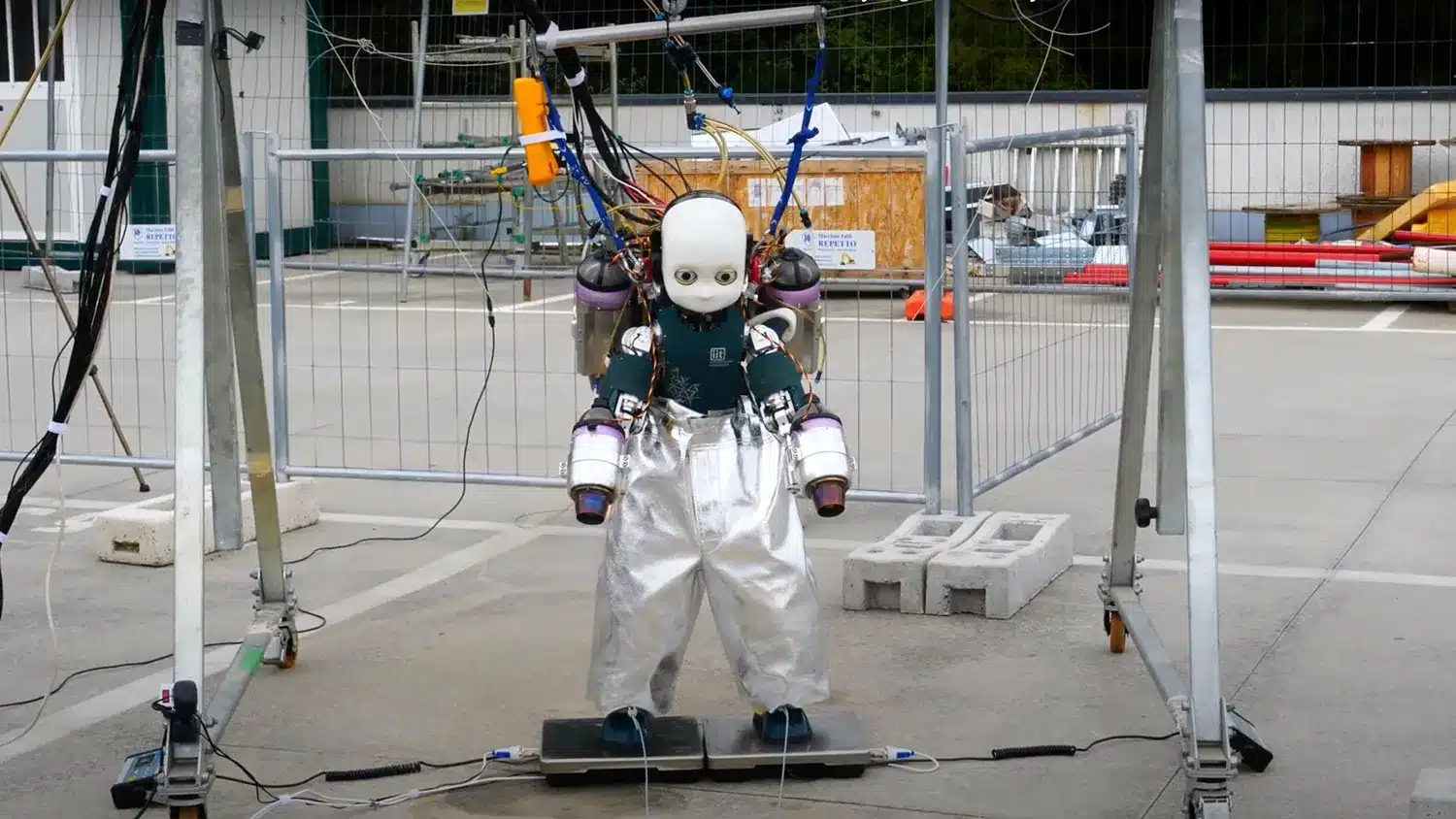
Il rumore non è quello che ti aspetti. Non è il ronzio elegante di un drone, né il sibilo controllato di un jet militare. È qualcosa di più grezzo, viscerale: quattro turbine che sputano gas a temperatura quasi supersonica mentre un robot con la faccia di un bambino si solleva di mezzo metro da terra. Per qualche secondo resta lì, sospeso, come se stesse decidendo se la gravità sia davvero una cosa seria. Poi atterra. Con una certa dignità, bisogna dire. Siamo nei laboratori dell’Istituto Italiano di Tecnologia di Genova e quello che abbiamo appena visto è iRonCub 3, il primo robot umanoide al mondo capace di volare con propulsione a getto. Dopo quasi dieci anni di sviluppo, cadute, qualche principio di incendio e infinite simulazioni, ce l’hanno fatta.
iRonCub, un bambino robot con quattro jet
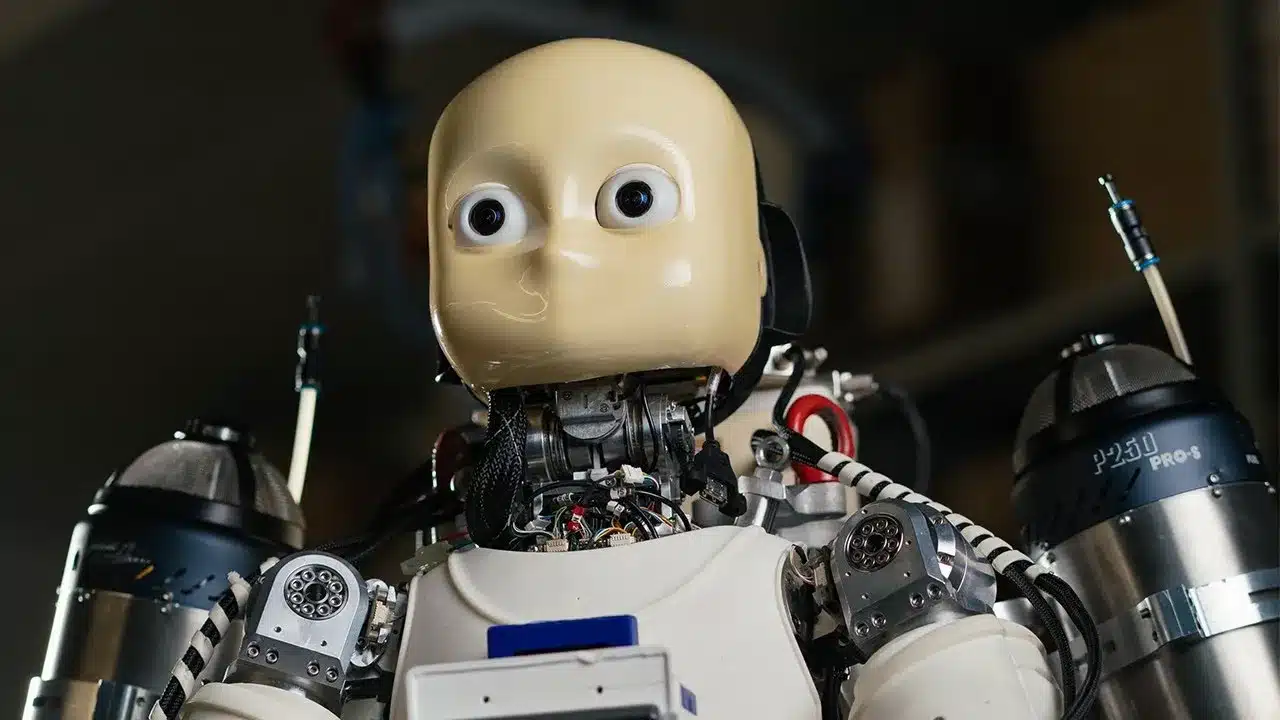
iRonCub3 è alto poco più di un metro, pesa 70 chilogrammi e ha la faccia di un bambino di cinque anni. Non perché qualcuno abbia pensato che fosse carino, ma perché deriva da iCub, la piattaforma robotica originale dell’IIT progettata nel 2004 per studiare lo sviluppo dell’intelligenza artificiale. Solo che stavolta, invece delle manine articolate, ha due turbine a getto montate sugli avambracci. E sulla schiena, uno zaino con altre due turbine. Il tutto genera oltre 1000 Newton di spinta, abbastanza per sollevare quel corpo metallico e mantenerlo sospeso. Per alcuni secondi. Abbastanza da contare.
Il progetto è guidato da Daniele Pucci, a capo del Laboratorio di Artificial and Mechanical Intelligence dell’IIT. Dal 2017 lavora su questo problema: far volare un robot che non è nato per volare. Lo studio è stato pubblicato su Nature Communications Engineering, frutto di una collaborazione con il Politecnico di Milano (per gli studi aerodinamici in galleria del vento) e la Stanford University (per gli algoritmi di deep learning). Non è roba che si improvvisa al bar.
Il problema è che non sei un drone
Far volare un drone è relativamente semplice. È simmetrico, compatto, progettato per quello. Far volare un umanoide è come cercare di tenere in equilibrio uno spazzolino da denti verticale su un ventilatore acceso. Il baricentro si sposta continuamente, le braccia e le gambe creano turbolenze imprevedibili, e poi c’è il fatto che le turbine sparano gas di scarico a 800 gradi Celsius, quasi alla velocità del suono. Se sbagli l’angolazione, il robot si scioglie. O prende fuoco. O entrambe le cose.
Per questo il team ha dovuto riprogettare tutto. Hanno costruito una nuova spina dorsale in titanio per reggere il peso delle turbine, aggiunto coperture resistenti al calore per proteggere la struttura, e calibrato l’angolo di inclinazione dei motori per evitare che i gas di scarico colpissero il robot. Il controllo del volo si affida a reti neurali addestrate su migliaia di simulazioni fluidodinamiche e test reali in galleria del vento. Come spiega Antonello Paolino, primo autore dello studio e dottorando tra IIT e Università di Napoli: “I nostri modelli includono reti neurali addestrate su dati simulati e sperimentali, integrate nell’architettura software di controllo del robot per garantire un volo stabile”.
La sfida più grande? Gestire la dinamica del volo in tempo reale mentre il software di controllo coordina il movimento lento delle articolazioni con la risposta rapidissima delle turbine. Le turbine impiegano tempo per accelerare o decelerare, quindi il controllo deve venire dal robot stesso, che muove i bracci-motore per mantenere la stabilità. È tipo giocare a Tetris mentre qualcuno ti spinge.
Perché farlo volare
La domanda è lecita. Perché non montare un robot su un drone e finirla lì? Perché iRonCub non è pensato solo per volare. È pensato per arrivare in zone dove nessun altro può arrivare, atterrare, e poi continuare a operare a terra. Immagina un terremoto. Un edificio crollato. Incendi, inondazioni, macerie ovunque. Un drone può sorvolare, ma non può aprire una porta. Un robot terrestre può manipolare oggetti, ma non può scavalcare ostacoli di tre metri. iRonCub può fare entrambe le cose. Vola dove serve, atterra, cammina tra i detriti, usa le mani (quando non sono occupate dalle turbine) per spostare oggetti o chiudere valvole di gas. È un operatore robotico multimodale.
Come avevamo già raccontato, la visione a lungo termine è quella di un robot avatar teleoperato da soccorritori che restano al sicuro mentre il robot entra in zone contaminate, instabili o troppo pericolose per gli esseri umani. La forma umanoide non è un vezzo estetico: è funzionale. Gli ambienti umani sono progettati per umani. Scale, porte, maniglie, interruttori. Un robot umanoide può interagire con tutto questo senza bisogno di attrezzature speciali.
iRonCub, cosa succede ora
Il primo volo di iRonCub3 è stato di 50 centimetri per alcuni secondi. Non esattamente Iron Man che attraversa Manhattan. Ma è un inizio. Il prossimo passo è migliorare il controllore di volo per gestire disturbi esterni come il vento, perfezionare l’atterraggio, e testare il robot in spazi più ampi. L’IIT sta cercando collaborazioni con l’Aeroporto di Genova per allestire un’area di test dedicata. Pucci stima che con investimenti importanti (circa venti milioni di euro per la sola tecnologia di volo) il robot potrebbe essere operativo in scenari reali entro cinque anni.
Nel frattempo, il team sta lavorando su un nuovo jetpack con un grado di libertà aggiuntivo per facilitare il controllo dell’imbardata, e valuta l’aggiunta di ali per voli a lunga distanza. Perché se devi far volare un robot umanoide, tanto vale farlo bene. O almeno, tanto vale provarci. Finché non prende fuoco.

