
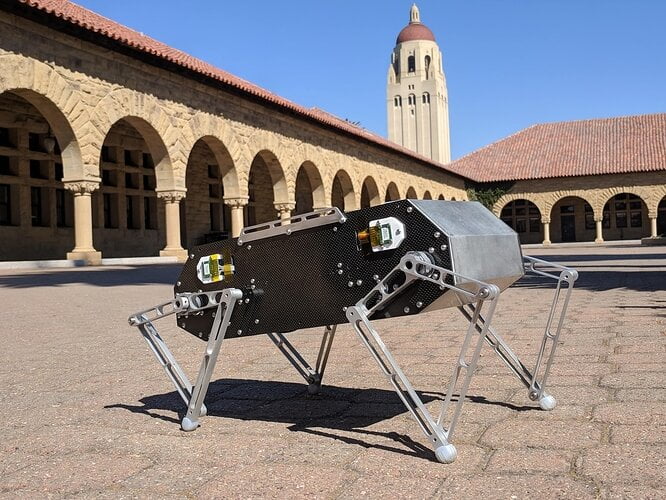
Concentrando i suoi sforzi sulla creazione di un robot in grado di attraversare scenari complessi e dissestati, gli studenti di Robotica alla Stanford University hanno sviluppato un robot quadrupede che non si limita a camminare praticamente su ogni terreno, ma fa anche di più: il suo nome è Doggo.
“Abbiamo già visto modelli di questo genere, ma nessuno di loro è open source.” dice Nathan Kau, ingegnere meccanico a capo del progetto. “La cosa bella di Doggo è che puoi costruirne uno da solo con un budget relativamente basso”.
Quanto basso?
Robot quadrupedi già visti all’opera (pensiamo a quelli della ormai nota Boston Dynamics) possono costare decine o centinaia di migliaia di euro, mentre ad un prezzo di circa 3000€ (compresa manifattura e spedizione delle parti) si può realizzare “in casa” un robot di tutto rispetto: la prospettiva che si crei un’ampia comunità di sviluppatori di questo sistema, in grado di estenderlo e migliorarlo è piuttosto concreta.
Per poter rendere replicabile il progetto di Doggo, gli studenti l’hanno costruito da zero: questo ha voluto dire più lavoro e tempo speso in ricerca iniziale, ma ha abbassato i costi in modo decisivo.
Cosa fa Doggo
Per la verità Doggo è già piuttosto abile nelle movenze: può camminare, trottare, saltare in alto e in lungo e mettersi sulla pancia proprio come i colleghi in carne e ossa. Attualmente ha le dimensioni di un beagle, ma è allo studio una versione più grande, chiamata Stanford Woofer, che potrebbe essere presentata domani alla International Conference on Robotics and Automation di Montreal in Canada.
“Abbiamo avuto già due anni fa l’idea di realizzare un robot quadrupede completamente open source, e dopo molti prototipi abbiamo deciso di procedere con Doggo,” spiega Natalie Ferrante, anche lei nel team. “Vederlo camminare per la prima volta è stato entusiasmante”. Qualche passo un po’ stentato agli inizi, ma grazie ai suoi motori in grado di calcolare per 8000 volte al secondo la posizione ora può perfino danzare e saltare (tenetevi forte) un metro in altezza.
“Si tratta in alcuni casi di prestazioni migliori rispetto a quelle dei più quotati robot già sviluppati”, precisa Kau.
Cosa farà adesso Doggo?
Se tutto andrà come previsto, Doggo segnerà l’inizio di una certa diffusione dei robot quadrupedi. “Stiamo lavorando per realizzare una piattaforma che aiuti chiunque a costruirsi un robot come questo,” dice Patrick Slade, altro membro del team. “Se vuoi lavorare nel campo del soccorso, puoi equipaggiare Doggo con sensori specifici e scrivere un po’ di codice per dargli l’abilità di attraversare grotte o passare sulle macerie. Se vuoi utilizzarlo per il trasporto puoi dotarlo di un braccio meccanico o di un contenitore per raccogliere ciò che vuoi spedire, e così via”.
La immagino così una “robotizzazione” di massa: amichevole, dal grande fattore umano e open source.

